


All these cars have one common Achilles' heel. The engines sit entirely ahead of the front axles; a great family recipe for understeer. Then tell the front tires - already taxed from trying to keep that front engine sitting outside the wheelbase from going straight - to put some power down and you can only make matters worse. There are ways to mitigate the understeer with suspension tuning, of course, but the toughest part is power-on understeer. I don't want to get much into tires, but the thing to remember is that because tires have a certain "grip budget" - how much total grip they can hold/generate before they let go - when you get on the power in a car that sends power to the front wheels (FWD or AWD), you will rob some of the precious grip you were relying on to turn the car in order to put all or some power down. You'll run out of front lateral grip sooner than you would have otherwise, as a result. Worse yet, because of the unideal engine placement, you need every last bit of lateral grip in the front. So what you typically do to mitigate that understeer is, generally speaking, give the front tires far more grip than the rears.
You know what all good handling front end heavy, FWD cars have in common? They turn into tripods and kick up the inside rear wheel when turning. You need as much grip at the front as possible to keep that engine hanging in the front in check so you tune for weight transfer to the front, lightening up the rear end in the process. That's great in a FWD car but with AWD, you make the rears less effective - the same tires you're now trying to send power to.. after having just added a whole lot of effort, weight, complexity, and cost to the car in order to be able to utilize them. As a result, you can’t let these cars turn into tripods and pretend the inside wheel doesn't exist half way around a turn. You are now using the rear wheels for power so they are far more useful, for one. For another, you can afford to lose a little grip from the fronts to the rears, since they don’t have to transfer all the power anymore. You can never lose sight of the unideal engine placement, though, that demands a lot of grip in the front.
Why is all of this relevant? Because you need to spend just as much effort managing power as you do managing available grip by tuning the suspension. That's how each car here defines itself. Where their characters and attitudes come from. And because differentials are a big factor in this, I made another post recently on various types of differentials in an effort to make this post more focused on the cars but still discuss diffs in a little more detail and answer some questions about the diffs discussed here. Here's a link to that post: Limited Slip Differentials - The Basics. With that said, let's start with the oldest car here; the Evo.
Mitsubishi Evo X MR

How many comparisons have thrown this out-of-production car into the mix of new entries to the segment? This isn't only out-of-production, it is also very old, with a platform that's a full generation and redesign older than the other cars here. You can notice that in NVH, the way the car looks, the way the interior feels.. but not the way the car drives.
Compared to the STI, the Evo X feels sharper, more nimble, and more agile. This is surprising because the STI, at first, seems to have the advantage. The Evo is heavier, to begin with. It's an older, presumably less stiff chassis. It uses a conventional bevel gear centre differential, giving it a 50:50 torque distribution. The STI's centre differential is a planetary type, giving Subaru the flexibility to gear it for a 41:59 torque distribution front to rear. No rear power bias, more weight, and possibly softer chassis sound like a few strikes against the Evo. But the Evo is happy to return punches all day.

Without slip, any power you send to the rear wheels will cause understeer. An open diff sends
virtually equal torque to both wheels so there's no steering moment and
your tractive forces push the car where the rear wheels are pointing; straight. A mechanical LSD sends (very slightly) more power to the inside wheel around a turn until there is slip, so you even have a negative steering moment. What do you do? You CREATE steering moment! Enter torque
vectoring differentials. The power you send to the back in the Evo goes through a
torque vectoring differential to then distribute that power side to side - forcing it to the outside wheel creates steering
moment. At the front, the Evo uses a gear-type LSD, maximizing use of available traction so you can put more power down. More power
down at the front (without slip) is good, because the tractive forces are
pointed in the direction you want to go, along with the front wheels. Both the Evo and the STI use limited slip mechanisms to lock front and rear axles if there is slip and shuffle more torque fore and aft. However, the
centre diff in the Evo is strictly an electronic LSD. When going around a turn without slip, it is completely
uncoupled. No lock, no resistance to turning.
The final piece of the puzzle is power distribution. Why only 50% to the rears and no rear power bias? Well, you need a lot of grip in the front to keep the engine in check. If the car is turning, you need to allow weight transfer to the front to increase grip there because of the unideal engine placement. The downside is that you rob the rear wheels of their grip so they can't put down as much power as you'd like. In the Evo, power goes from the engine to the transmission, then to a differential that evenly distributes power front and rear. Suspension tuning is a little more neutral than the STI and favours front grip. That means you can use more power up front than you'd think. With the right suspension tuning, tires, and differential, you can get away with a lot of power up front than you used to. Think of the current FK8 Civic Type R which makes more power than this Evo does, and all of it goes to the front wheels. But the Evo X is no Civic...
In addition to the centre differential allowing 50:50 power distribution, there is an electronically controlled centre clutch pack acting as a limited slip mechanism. If either front or rear axles start to slip, it progressively locks allowing more power to be sent to the axle with more traction. So with that in mind, you either allow that better 50:50 power distribution to be able to utilize more power there where you've put more of the available grip due to weight transfer, or you prevent a lot of weight transfer to the front so you can bias power to the back without losing traction, at the expense of front end grip and more neutral handling. The Evo chooses the former.

All of this translates into a huge difference on track. It turns in with surprising precision. You can still find some understeer at the limit but it is easy to avoid and manage. You can get heavy on the power very early and trust it. You need very little corrections and just let the car drive the proper line as if Mitsubishi taught it during development. I may be exaggerating but you'd probably be too, if you've driven a few different cars on track and felt the difference. Another plus is that, because the Evo is close to neutral, if the centre diff locks due to slip, it will help the car rotate. Because, if locked, the front and rear axles' speeds have to be closer than they would be, unlocked. That means the tires on one axle have to slip a little to more closely match the others. If you have more front end grip, the rears will slip first, helping the car rotate and reducing power-on understeer. But don't confuse that slip with lack of stability. The Evo wants to make a hero of you. It is so stable, so easy to control, that you'd be forgiven to think it can't go wrong. The whole car is focused on managing power as efficiently as possible - front to back and side to side - to optimize the turn. You can just feel the car working under power, managing the grip, managing the power distribution. And it feels so eager to do so.
In addition to the centre differential allowing 50:50 power distribution, there is an electronically controlled centre clutch pack acting as a limited slip mechanism. If either front or rear axles start to slip, it progressively locks allowing more power to be sent to the axle with more traction. So with that in mind, you either allow that better 50:50 power distribution to be able to utilize more power there where you've put more of the available grip due to weight transfer, or you prevent a lot of weight transfer to the front so you can bias power to the back without losing traction, at the expense of front end grip and more neutral handling. The Evo chooses the former.

All of this translates into a huge difference on track. It turns in with surprising precision. You can still find some understeer at the limit but it is easy to avoid and manage. You can get heavy on the power very early and trust it. You need very little corrections and just let the car drive the proper line as if Mitsubishi taught it during development. I may be exaggerating but you'd probably be too, if you've driven a few different cars on track and felt the difference. Another plus is that, because the Evo is close to neutral, if the centre diff locks due to slip, it will help the car rotate. Because, if locked, the front and rear axles' speeds have to be closer than they would be, unlocked. That means the tires on one axle have to slip a little to more closely match the others. If you have more front end grip, the rears will slip first, helping the car rotate and reducing power-on understeer. But don't confuse that slip with lack of stability. The Evo wants to make a hero of you. It is so stable, so easy to control, that you'd be forgiven to think it can't go wrong. The whole car is focused on managing power as efficiently as possible - front to back and side to side - to optimize the turn. You can just feel the car working under power, managing the grip, managing the power distribution. And it feels so eager to do so.
Forget about lap times for a moment. They can easily be improved (to an extent) with some relatively minor tweaks. For example, when it first came out, this car did a lap of 3:13.3 at VIR for Car and Driver's LL 2008. That's only half a second ahead of the 3rd generation WRX STI, despite reviews generally agreeing that the Evo feels much sharper and track ready. It wasn't until they brought it back (in SE guise) for LL 2011 and did 3:10.5, putting it a little over 3 seconds ahead of the STI. And one way or another, it was still an Evo X. The times don't tell the whole story. Focusing on the times is missing the point. Despite the age, despite the crappy interior, the relative lack of refinement, the dire image of Mitsubishi, and even being out of production, this car feels just as sophisticated, track focused, and special as the other newer cars here. That's the point.
Subaru STI

I'm not sure if Subaru's reputation is what is influencing current
design philosophy or current design philosophy is what's fueling the
on-going reputation. But I imagine that at every design meeting during the
STI's development, the head engineer always asked everyone involved: "so what have
you done since the last meeting to make sure it better puts power down?" I
can picture someone, at some point, suggested big rear anti roll
bars during development for better turn in. He probably got fired. That's not to say the STI handles badly. It's still sharp with great turn in. It has a lot of grip and does not plow straight under power. That's just not its party piece. It's not its specialty.
The STI claws the road under power.
If it were an animal, it would be a big cat - a lion or a tiger - and
every time you got on the power, it would crouch, wag its rear end sticking in the air,
and pounce forward. Whereas the Evo is all about managing power, the STI is all about putting it down. Traction seems to be the priority. You need just a little more patience than the Evo before getting back on the power but then it will put power down with absolute tenacity.
It uses a gear type front diff
like the Evo so there is no difference there. In the centre, though, it uses not one, but two
types of limited slip mechanisms - a gear type and an electronically controlled
clutch pack. The planetary gear centre diff utilizes helical gears to create thrust forces and provide some lockup under power. That
means, as you roll into the power, the diff progressively locks. That’s great
for traction as it locks before slip occurs (remember how the STI is all about
traction?) but more lock means resistance to turning so it won’t be as agile.
The second LSD is an electronically controlled clutch pack – similar to the Evo
– to supplement the gear type for more locking if need be or if you want to
manually select and lock the torque distribution instead of letting the
computer do the work.
You can forget all of that torque vectoring non-sense in the Evo. That's what the STI would say if it could talk. In a slalom test by Edmunds back when the Evo X was introduced, they found that the torque vectoring diff can be caught off guard in short and quick transmissions like a tight slalom and wag the rear end a little. The STI wouldn't have any of that and would happily give up the effective steering from torque vectoring. The rear diff in the STI is another gear type differential, unlike torque vectoring in the Evo, which again locks under power. It won’t wait for slip or a computer to think and shuffle power. It doesn’t want to slip. That’s the STI’s mission.

You can forget all of that torque vectoring non-sense in the Evo. That's what the STI would say if it could talk. In a slalom test by Edmunds back when the Evo X was introduced, they found that the torque vectoring diff can be caught off guard in short and quick transmissions like a tight slalom and wag the rear end a little. The STI wouldn't have any of that and would happily give up the effective steering from torque vectoring. The rear diff in the STI is another gear type differential, unlike torque vectoring in the Evo, which again locks under power. It won’t wait for slip or a computer to think and shuffle power. It doesn’t want to slip. That’s the STI’s mission.

Then you get to weight transfer, where the STI refuses to rob the rears of their traction, giving them better grip at the expense of the fronts. It's more stable and means you can put more power down without slip. But it's at the expense of some lateral grip at the front and that precise point-and-go attitude of the Evo. Corner speeds have to come down some, but you should be able to make up for it in traction in corner exit.
With that said, the STI has a certain charm to it - a certain mechanical feel that makes it more natural. It drives almost like a RWD car, but not the best and most sporty of the breed. It drives like a very tame one - one that is very capable but has safe understeer dialed in and massive amounts of traction. As is to be expected of the front weight bias, you get a good helping of limit understeer. If you go on the power, you can help the car rotate, but you do so by slip. Just as you would in a RWD car, especially if it's locked in 59% power going to the back. You can break traction and get it to rotate. It also uses brake-based lock, which does help, but isn't nearly as effective as a torque vectoring diff. The slip also feels abrupt compared to the Evo and the RS. That could have something to do with the modifications - this particular STI had camber (-2.5 degrees all around) and sticky BFGoodrich g-Force R1 track tires (which are different from the tires used by the owner for the lap time quoted at the end). The abruptness could easily be attributed to those near-slick track tires, but I would be surprised if, even when stock, the rear end would step out as smoothly as the Evo and or anywhere as gracefully as the RS.
The mechanical feel and nature does more to impress too, depending on how you look at it. The Evo will make a hero of you, but perhaps at the expense of doing more for you. You'll always wonder how much you could do without the car's help. In the STI, you feel more in control and will get it out feeling more accomplished, especially with the option of locking front to rear torque. It feels like the car just gave you all the traction in the world on a silver platter and what to do with it is entirely up to you. The Evo has a wider range of torque distribution front to back and then again side to side on the rear axle. Aside from the torque vectoring diff simply sending torque to the outside wheel to help the car rotate, it's hard to say whether the Evo actually does that much more for you, as far as managing power, or the STI just hides it better. But it certainly feels like the STI is less intrusive or in control, which is a big plus in my book.
Ford Focus RS

If this car had any more hype and people talking about it, it'd have its own reality show. Drift mode, torque vectoring, optional Michelin Pilot Sport Cup 2 tires from the factory (standard in Canada), 350 hp, the lot. Plenty of buzzwords. Ford set it up for disappointment. It has to deliver on so many things, and deliver well, to meet expectations, let alone impress. It's bound to disappoint.. Or is it?
The RS takes the near neutral balance of the Evo and turns it up a couple notches. It then takes the STI's rear power bias and turns that up a couple of notches as well. What's the problem in a front-end heavy FWD car, understeer? Ford says (probably with a smirk): let's fix that for you. When I said you could either allow front power and weight transfer bias or rear power and weight transfer bias, I actually left out secret option number 3. Give the front end a lot of grip, let the back lighten up, and still send plenty of power back there. Better still, allow the rear axle to use up to 100% of that power to one wheel to help the car steer.
The RS has a very noble mission - make you forget it's a FWD-based hot hatch. And boy, does it ever try. You drive this car properly, and you may actually forget that you are driving a FWD-based hot hatch. The rotation under power is not only helpful, but very refreshing. And massively entertaining. Plus, you can't help but get all giddy when driving a humble Focus that power oversteers coming out of corners. The Evo makes use of an AWD system to beautifully manage power and maximize corner speed. The STI makes use of an AWD system to give you traction a 911 would envy. What Ford does, though, is use an AWD system to make the car turn. Speed seems like a byproduct since, you know, you do have to turn to get around a track. And the RS is very good at that.
The RS uses a torque vectoring rear differential like the Evo, although of completely different design that does not rely on a traditional differential at all. Instead, it uses two sets of hydraulically actuated wet clutch packs that individually control the amount of torque each rear wheel gets at all times. In the centre, the RS, once again, does away with a traditional differential. It relies on those individual clutch packs to proportion power to the rear. If both clutches are disengaged, you get no transfer to the rear. If both clutches are equally locked - fully or partially - you get torque transfer in proportion to the amount of lock up, split equally between the two wheels. Or you could vary lockup between the two sides to individually send torque to either wheel.
Using clutch packs to proportion power to the rear is very common in mainstream AWD vehicles, although is typically done via a single clutch pack before the rear axle and a conventional rear differential. This is much less desirable than a centre differential in FWD-based performance cars because it typically only sends power to the back after the front end has already started to lose grip, instead of always splitting power. You can read more about that in my post AWD Systems Explained. So how does the RS overcome this? It over speeds the rear wheels.
Similar to how the STI gears the centre diff to bias power to the back, the RS is geared at the power takeoff unit to drive the rear wheels faster, although much more aggressively at a ratio of 1.7 the speed of the fronts, thereby having a higher load and transferring more torque, resulting in rear bias. And, like the Evo, this also allows good front power bias if conditions allow by progressively reducing lockup on the clutch packs. At the front, the RS uses an open differential with brake-based lock, a disadvantage to the Evo and the STI. But, because of the aggressive front weight transfer, how much grip the the front axle has as a result, and how much power it sends to the back, I didn't run into the limitation of the front axle (i.e. excessive inside wheel slip). I have no doubt that you'd see an improvement with a true LSD at the front, but you'd probably struggle to get even near the same improvement that you'd see in a FWD car like the Focus ST.
The RS takes the near neutral balance of the Evo and turns it up a couple notches. It then takes the STI's rear power bias and turns that up a couple of notches as well. What's the problem in a front-end heavy FWD car, understeer? Ford says (probably with a smirk): let's fix that for you. When I said you could either allow front power and weight transfer bias or rear power and weight transfer bias, I actually left out secret option number 3. Give the front end a lot of grip, let the back lighten up, and still send plenty of power back there. Better still, allow the rear axle to use up to 100% of that power to one wheel to help the car steer.
The RS has a very noble mission - make you forget it's a FWD-based hot hatch. And boy, does it ever try. You drive this car properly, and you may actually forget that you are driving a FWD-based hot hatch. The rotation under power is not only helpful, but very refreshing. And massively entertaining. Plus, you can't help but get all giddy when driving a humble Focus that power oversteers coming out of corners. The Evo makes use of an AWD system to beautifully manage power and maximize corner speed. The STI makes use of an AWD system to give you traction a 911 would envy. What Ford does, though, is use an AWD system to make the car turn. Speed seems like a byproduct since, you know, you do have to turn to get around a track. And the RS is very good at that.
The RS uses a torque vectoring rear differential like the Evo, although of completely different design that does not rely on a traditional differential at all. Instead, it uses two sets of hydraulically actuated wet clutch packs that individually control the amount of torque each rear wheel gets at all times. In the centre, the RS, once again, does away with a traditional differential. It relies on those individual clutch packs to proportion power to the rear. If both clutches are disengaged, you get no transfer to the rear. If both clutches are equally locked - fully or partially - you get torque transfer in proportion to the amount of lock up, split equally between the two wheels. Or you could vary lockup between the two sides to individually send torque to either wheel.
Using clutch packs to proportion power to the rear is very common in mainstream AWD vehicles, although is typically done via a single clutch pack before the rear axle and a conventional rear differential. This is much less desirable than a centre differential in FWD-based performance cars because it typically only sends power to the back after the front end has already started to lose grip, instead of always splitting power. You can read more about that in my post AWD Systems Explained. So how does the RS overcome this? It over speeds the rear wheels.
Similar to how the STI gears the centre diff to bias power to the back, the RS is geared at the power takeoff unit to drive the rear wheels faster, although much more aggressively at a ratio of 1.7 the speed of the fronts, thereby having a higher load and transferring more torque, resulting in rear bias. And, like the Evo, this also allows good front power bias if conditions allow by progressively reducing lockup on the clutch packs. At the front, the RS uses an open differential with brake-based lock, a disadvantage to the Evo and the STI. But, because of the aggressive front weight transfer, how much grip the the front axle has as a result, and how much power it sends to the back, I didn't run into the limitation of the front axle (i.e. excessive inside wheel slip). I have no doubt that you'd see an improvement with a true LSD at the front, but you'd probably struggle to get even near the same improvement that you'd see in a FWD car like the Focus ST.
Some people ran into overheating issues where the rear differential/drive unit (RDU) got disabled and the car basically became FWD. A friend of mine has an RS and ran into that problem the first day he was on the track. I never had a hiccup. That could be because of how little time I spent in the RS - a 15 minute stint, a 10 minute stint and a 5 minute stint. It could also be because of my driving style that we suspected strains the AWD system less (more on that in a moment). Or the fact that the car I drove was well broken in with over 12k kms on the clock, about 7.5k miles, because that same friend who ran into the issue the first time he was on track had no issues in subsequent times with more mileage. That lead us to thinking it might be an over protective feature during early break-in since the first time he was out, the car had just 1,800 kms on in, or just over 1,100 miles. I hope that we can say with more certainty with more track time next season whether or not that's an actual problem, but for now, it seems like a non issue.

So what does all of this mean on track? You'll have to recalibrate your turn in points and steering inputs compared to a car with similar turn in response and handling balance because you simply don't need as much steering from the front wheels. You can feel the car working like the Evo but it doesn't seem "smart" in the sense of correcting your line. Where the Evo feels like it knows the right line and reads your mind, the RS doesn't. Yaw in the RS seems to be directly linked to your right foot - give more power and you get more rotation. If you are using a lot of steering and too much throttle, the car thinks you really want to turn and will put plenty of power outside to get the car turned hard, even if that means running out of the room on the inside and basically hitting an early apex. The Evo, I believe, knows exactly how hard the car should turn based on steering angle. If you're turning a certain amount and the yaw sensor says the car isn't turning enough, you have understeer, and it will shuffle power outside to turn the car. If yaw is too much, it will shuffle power inside to put the car back in line. The RS seems to have more faith in you, for better or for worse. The car gives you what you demand with your hands and right foot. Kind of like the way the STI gives you traction on a silver platter, only the RS gives you a hyper ability to turn (for a hot hatch).
There are many excellent RWD cars that let you steer with your right foot. The difference is how much steering you can do and, let's not forget, that this is an AWD car. It still has a huge traction advantage. You can go flat out very early. In fact, in a lot of turns, I was flat out before apex because power no longer makes you go wide, it actually helps you turn. And you never have to worry about spinning out because it is massively easy to manage at the limit. It's fastest with some rear slip. The thing that you'll have to learn is trusting the car. Because it can hold and recover from huge yaw angles, all while still putting power down and gaining speed. You have to learn when to put your foot down and be able to put your foot down. Hard. That's the way you can maximize the AWD system. You need a lot of sisu or experience to do that, when your past experiences and your brain are telling you that you cannot do that here, otherwise you'll either spin out or plow straight.
It isn't without fault. The engine is still sitting far ahead and you can find limit understeer. But, compared to the other cars, it's like finding a lost sock in a dryer. The trick, in my opinion, is to not drive this car fast the way you do other cars. You don't maximize corner entry. In fact, you sacrifice corner entry just a little. The trouble is that, if you maximize corner entry, that means that you are coming in basically at the edge of grip. Right up to the limit. The car is as close to neutral as you'll probably get in an AWD hot hatch, but there's still some safe understeer left on the table. You'll find that and get frustrated. You can go on the power to correct, but because you're on the edge, you'll mostly correct by spinning, not by torque vectoring, because the tires are near the limit already in lateral grip and can't put much more power down without slipping. There's nothing wrong with that. That's what you do in a good RWD car to help the car rotate. But it's missing the point of this car and wasting all that went into the AWD system along with a good chunk of the torque vectoring benefits. You need to conserve some grip at the rear tires to use for putting power down because that power is going to help you turn.
The best part of all, I believe, is that you'll be just as fast if you suit your driving to the car. The same friend who bought an RS this summer complained about understeer in a few turns. He had better corner entry than me, with higher entry speed and later braking in nearly every corner on the track. His lap time? 0.28 s slower than mine. I could take much better advantage of torque vectoring because the rear tires weren't as burdened as they would have been with optimal entry. That means I can get the car rotated as I am on the power and gaining speed, giving me a better corner exit. I think throwing the car into a corner is good for fast turns. Conserve speed and momentum. In slow corners, though, you have to adjust your driving.
But no matter how you drive this car, the real treat is how close it is to absolute neutral handling for a practical hot hatch. How easy it is to have fun with the power and how manageable and controllable it is when it lets go. It really does a very good impression of a true sports car, one that just happens to be a practical hatchback. And while it may fall short occasionally and let you know it isn't without compromise, it more than makes up for it by how much fun you'll have driving it.
VW Golf R
You might have noticed that the Golf R is curiously missing from the title. Or that the Evo X is in it, even though I previously posted and said that it is out (link: Mods and Update: Focus RS vs Golf R vs WRX STI vs Evo X). Initially, I was going to test all four cars (link to original post: Intro: Focus RS vs Golf R vs WRX STI vs Evo X). Some back and forth, scheduling conflicts, etc. meant that I could only get hot laps in the Focus RS, find out what the WRX STI and Evo X are like on track but no opportunity for a time, and no impressions at all in a Golf R. Such is the trouble without a big audience and manufacturer-provided cars for review.
I'm just as disappointed as you are. Due to the time of year, the season is coming to a close and I won't get another opportunity until the next season to test again so I thought I'd post what I have and hope for a better outcome next season
Lap Times
Although I had no opportunity to do hot laps in the Evo and the STI, I got lap times and logs from the owners. First, here's a map of our local track, Atlantic Motorsport Park, to clarify a few turns. Namely, Turns 6, 8, and 10. All these turns don't need the use of brakes in entry or even backing off enough to scrub off speed. In fact, turn 6 is taken flat out from start to finish. As a result, they can't be marked well on the track logs so I hope the map below can clarify.

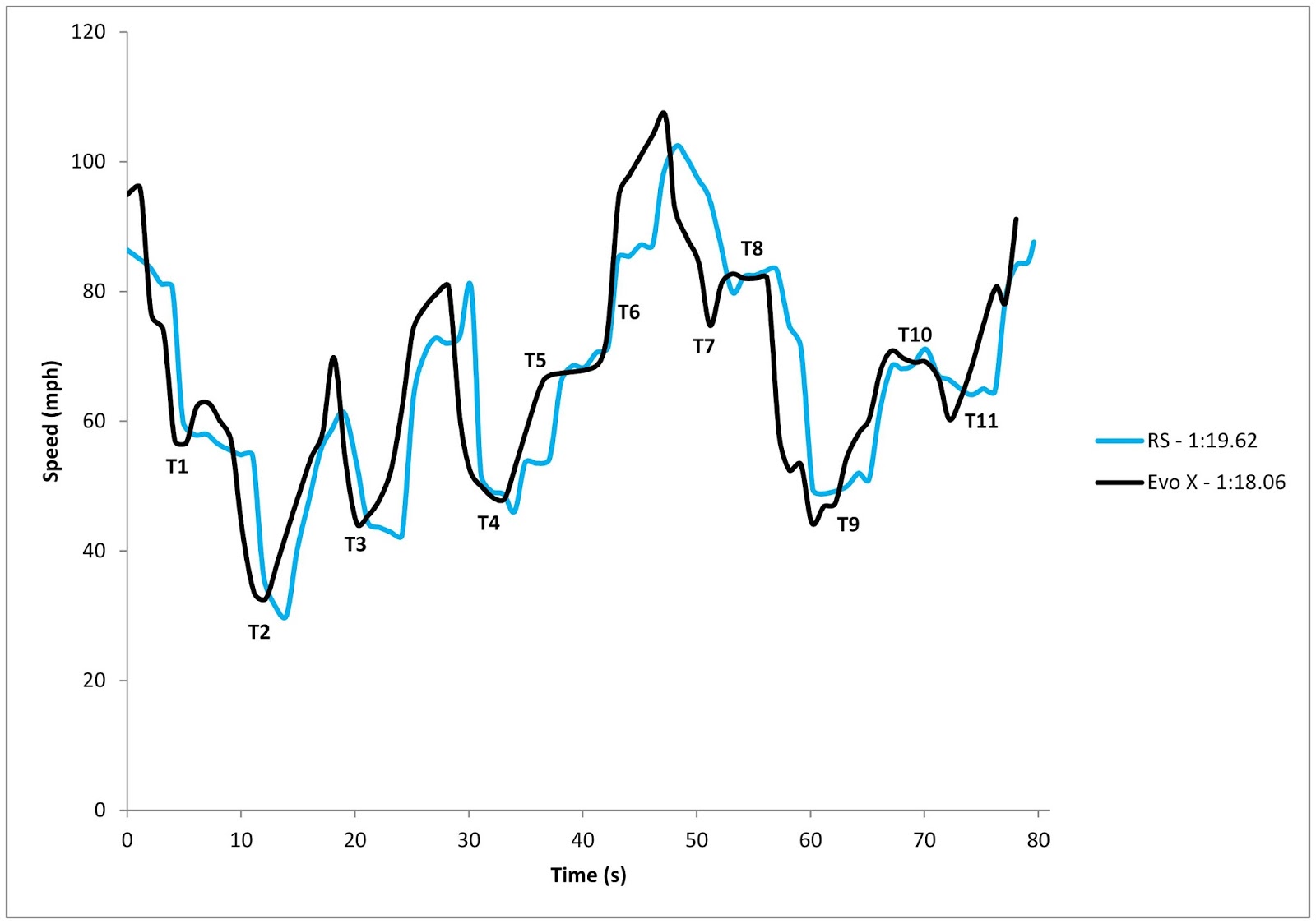
With that out of the way, here are the lap times, followed by track logs of the Evo vs the STI, Evo vs RS, and RS vs STI.
| Best Lap | |
|---|---|
| Evo X MR - modifications:
|
1:18.06 |
| WRX STI - modifications
|
1:19.72 |
| Focus RS - stock
|
1:19.62 |

STI vs Evo X: If they were stock and driven optimally by the same driver, you should
expect higher corner speeds in the Evo but better exits in the STI. It's tough to say which car has the grip advantage as they stand, with modifications. The STI has stickier but slightly narrower rubber and very good camber for a street car but much narrower wheels. The Evo X has an AWD system more suited for maximizing corner speed, suspension upgrades, wider wheels and tires, but no camber and street tires. Their corner speeds are extremely close, suggesting it's wash if we assume comparable driver skills (remember, they're different drivers). The extra power in the Evo shows in steeper acceleration curves out of T2, T3, back straight, and T11 leading to the front straight and appears to have been the winning factor. Time wise, it looks like the Evo made all its lead on power, as they appear to be in a dead heat up to T5 leading to the back straight. The Evo should also have a slight advantage in shifting, being the MR with a dual clutch automated manual (it is quick).

Evo
X & STI vs RS: Despite the stock suspension, much narrower wheels and tires,
the RS appears to have a consistent advantage in corner speeds vs both cars through
high speed turns - basically the second half of the track past turn 6 -
presumably due to less understeer. The STI should have a huge grip advantage, with similarly sticky tires that are actually much wider and camber. The Evo is tougher to judge, since the RS has much better compound but both wheels and tires are far narrower. I found that the Focus likes slightly
slower-in-faster out approach in slow turns to utilize the torque
vectoring, as I mentioned earlier, and this appears in the logs, where the Evo and STI have better corner entries into T2 and T3 but the RS seems to
have better exits.
The STI's modifications seem to provide it enough of a grip advantage to overcome the RS' handling advantage but without any more power, they're nearly tied. The Evo's suspension modifications seem to do the same, but the power advantage allows it to actually pull ahead slightly in just about every corner of the first half of the track. With that said,
the RS was seriously held back by the 91 gas, IMO, since we don't have
93 locally.
It's clear, in my opinion, between T3 and T4 - just before braking
point - the RS just loses steam and stops accelerating, then briefly gets back
on. I could even feel that on the track. Between T4 and T5, the same thing happens. Then again between T5 and
T6 and on the back straight. Finally, after exiting T11, the RS pulls
power again before finishing on the front straight. How much is that worth? I went through the logs and
adjusted the data as if the RS didn't lose power and here's the result:

Yep, just over a second. The lap time would have been 1:18.61, 1.01 s faster than otherwise. This is with absolutely no changes to the lap - same turn in, braking points, amount of braking, etc. - as you can see by the two laps being identical except for the sections where the RS seemed to have pulled power. How much is it making on 91? Don't know, but the Mustang EcoBoost is supposed to lose 35 hp when going from 93 to 87, 11.3% of peak. If we assume the same in the RS, it would be making 310 hp on 87 and somewhere between 310 and 350 on 91, which should actually be optimistic because the RS makes more boost so it should be more sensitive to octane than the Mustang. To calculate acceleration assuming no loss of power due to 91 gas, I used Car and Driver's test data of the RS, trended them, and used that data to calculate adjusted speeds had the car not pulled power. With the corrections, the lap times would look more like this:
| Best Lap | |
|---|---|
| Evo X MR | 1:18.06 |
| WRX STI | 1:19.72 |
| Focus RS (corrected) | 1:18.61 |
Now, you can't claim the 1:18.61 time as the Focus time. Because it isn't. But I wanted to give it a more fair representation by correcting the time, in case you're curious how much better it could be on better gas. Another disadvantage for the Focus is seat time. Where best laps for the Evo and the STI were set by the owners, with hours of seat time in the cars, I had just under half an hour in the RS overall. The owners of both cars have had these cars for as long as I've known them, about two seasons. But even within one day, in a car you're already very familiar with, you can expect to get better as the day goes along (unless heat becomes a factor). Case in point; the 1:18 time in the Evo was preceded by slower lap times, where the first session was all 1:20's and slower, the second was 1:19's, and the third had the 1:18 lap. If we assume a similar drop in the RS with more seat time (~ 2 seconds), along with 93 gas or octane boost (another ~ 1 second), the RS would have the best lap by a substantial margin, with a best lap in the 1:16 range.
3rd Place: Subaru WRX STI: It was really tough between this and the Evo. Assuming all are stock, I really think the STI would be the easiest to drive fast for an average track guy who goes to a couple track days and HPDS's a year. It has the most traction so it puts power down really well and, because it would make most of the time in corner exit, you can still get a great lap even if you don't nail the braking and corner entry. The RS and Evo need you to work more on those areas. It is also the most natural feeling in terms of handling and it's the one I would put my money on when the white stuff starts falling because of the better stability and traction. But on track, compared to the other two, it just feels like it's missing an edge.
2nd Place: Mitsubishi Evo X MR: I still cannot get over how this car drives on track despite its age. It is hugely impressive. It had the best raw time, albeit helped a lot by the modifications. It feels so precise, yet so stable, and manages power really well. For someone who doesn't care about the added practicality of the hatch, the refinement, or the subjective fun to drive factor of the RS, the Evo would probably be a more appealing car.
1st Place: Ford Focus RS: If one of these cars would serve as a daily driver, you'd never regret picking this car just because of how much more refined it is, plus the practicality of a hatchback. And then you'd take it to a track and find out what a blast it is. It is more neutral than any other production hot hatch dares to be. It will powerslide and dance, at full throttle, with just the right amount of yaw in corner exit, in a way a FWD-based car has no right to. And, if you consider the modifications of the other cars, the lack of 93 gas and octane boost during the test, and the very limited seat time, you'll find the lap times to be very impressive. The potential, assuming better gas, is even more so and, with more seat time, it could be even better. Did I mention it's easily the most fun?
Footnotes:
I've put a lot of time researching the AWD systems of these cars, especially the Evo X and the STI, since it seems no two people quite agree on exactly how they work. I cannot say with 100% certainty that I interpreted the countless articles, diagrams, and drivetrain sections properly, so take that for what it's worth. There are a lot of conflicting opinions out there and you may have done your own research and come up with your own understanding that's different. If that's the case, feel free to comment or message me and include links/source and I'll be happy to update if there's an error.
Like on Facebook! If you like this post, please remember to like Rams Eye The Track Guy on Facebook through the link on the sidebar on the right!
Photography by Kevin Doubleday and Albert Hofman










Fantastic write up. I really enjoyed it. Thank you!
ReplyDeleteThank you, glad you enjoyed it!
DeleteExcellent write up. Great read. I'm an X owner looking at the RS
ReplyDeleteThanks! Much appreciated. I wouldn't hesitate to get the RS. It is a blast. The only thing that might be disappointing is that I don't see aftermarket support being as strong as the Evo yet. If you don't have any big plans right out of the gate, though, that shouldn't be an issue.
DeleteWell written and interesting article - thank you. Keep up the good work! :)
ReplyDeleteThank yyou for writing this
ReplyDelete